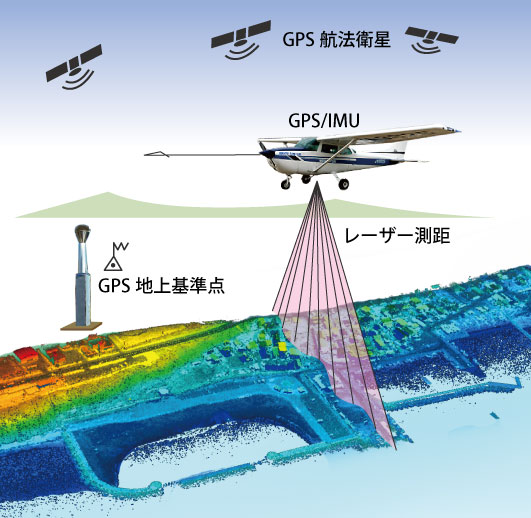
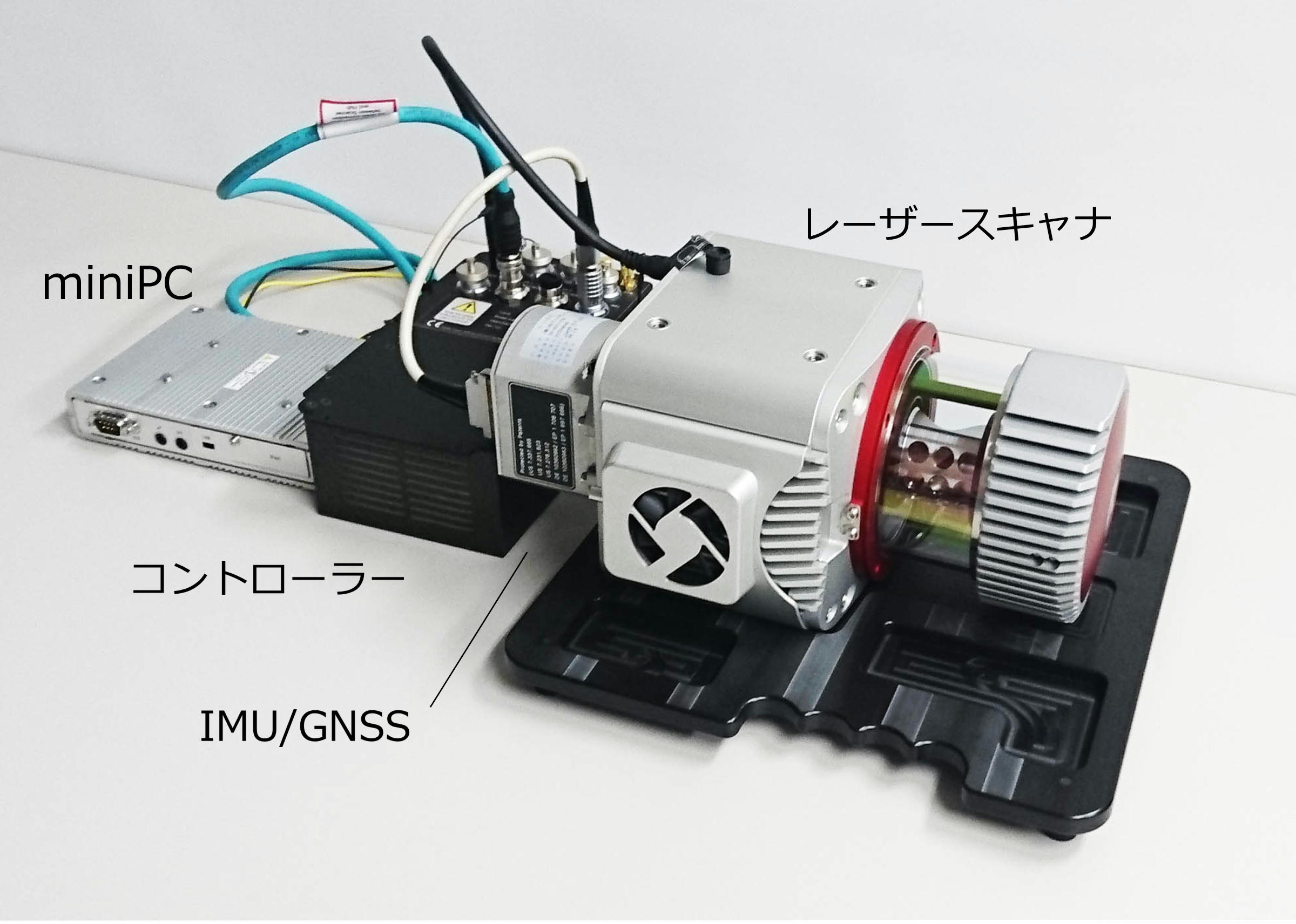
弊社が使用しているレーザーシステムは、(株)リーグルジャパンが販売しているVUX-SYSです。
<VUXー1LRスペック>
計測距離:5m~1.350m
パルスレート:最高820KHz(秒82万発)
精度:10mm(確度15mm)
スキャン確度:330°(FOV)
フットプリント:50mm/100m(0.5mrad)
※UAV搭載時は左右下向きにSONY-アルファ7を2台搭載
※2017年IMU改修とSYS化により、初期導入時より約10倍、精度向上いたしました。
※データシートはこちら ←リーグルジャパン社HPからダウンロードください。